October 17, 2014
A shoulder of continental shelf east of Tasmania’s Cape Barren Island marks the edge of Flinders Commonwealth Marine Reserve (CMR), a southern spoke of Australia’s three-million-square-kilometre CMR Network.
Iconic seabirds – albatrosses and petrels – snatch fish and squid along this marine reserve proclaimed in June 2007, that stretches some 600 kilometres towards New Zealand.
Below the surface, seafloor habitats of all description cover depths from 40–3000 metres: from outcrops and canyons cloaked in corals and sponges, to steppes of sandy sediments.
The temperate reef systems here support many mobile and commercially-important species, yet little is known about biological communities beyond depths accessible to divers (below 25 m).
Yet biodiversity inventories at a range of scales, and an understanding of the bio-physical processes that shape these systems, are needed to guide monitoring programs for reserve management.
Flinders CMR has been the focus of a NERP Marine Biodiversity Hub project to help build this knowledge base and monitoring capacity, by developing and testing cost-effective survey techniques.
The three-year project, which began in 2011, pioneered a suite of survey and analytical approaches, and rewarded scientists with the first comprehensive, high-resolution maps of reef systems and associated diversity across the Flinders shelf.
This regional-level variation in reef systems is a clear example of the CMR network encapsulating and protecting a range of major conservation values through a regionally representative planning framework.
Surveys, surveys and statistics
(click on image to open in new window)
The Flinders CMR project mapped reef habitats on the continental shelf and slope, (such as reef, cobble, sand, mud and canyon), and the biodiversity they support, with a focus on reefs and associated fishes and sessile invertebrates, (such as sponges and corals).
Forty sites were selected for investigation using the novel, statistically-based survey design Generalised Random Tessellated Stratified, which was shown to account well for the spatial distribution of habitats and communities.
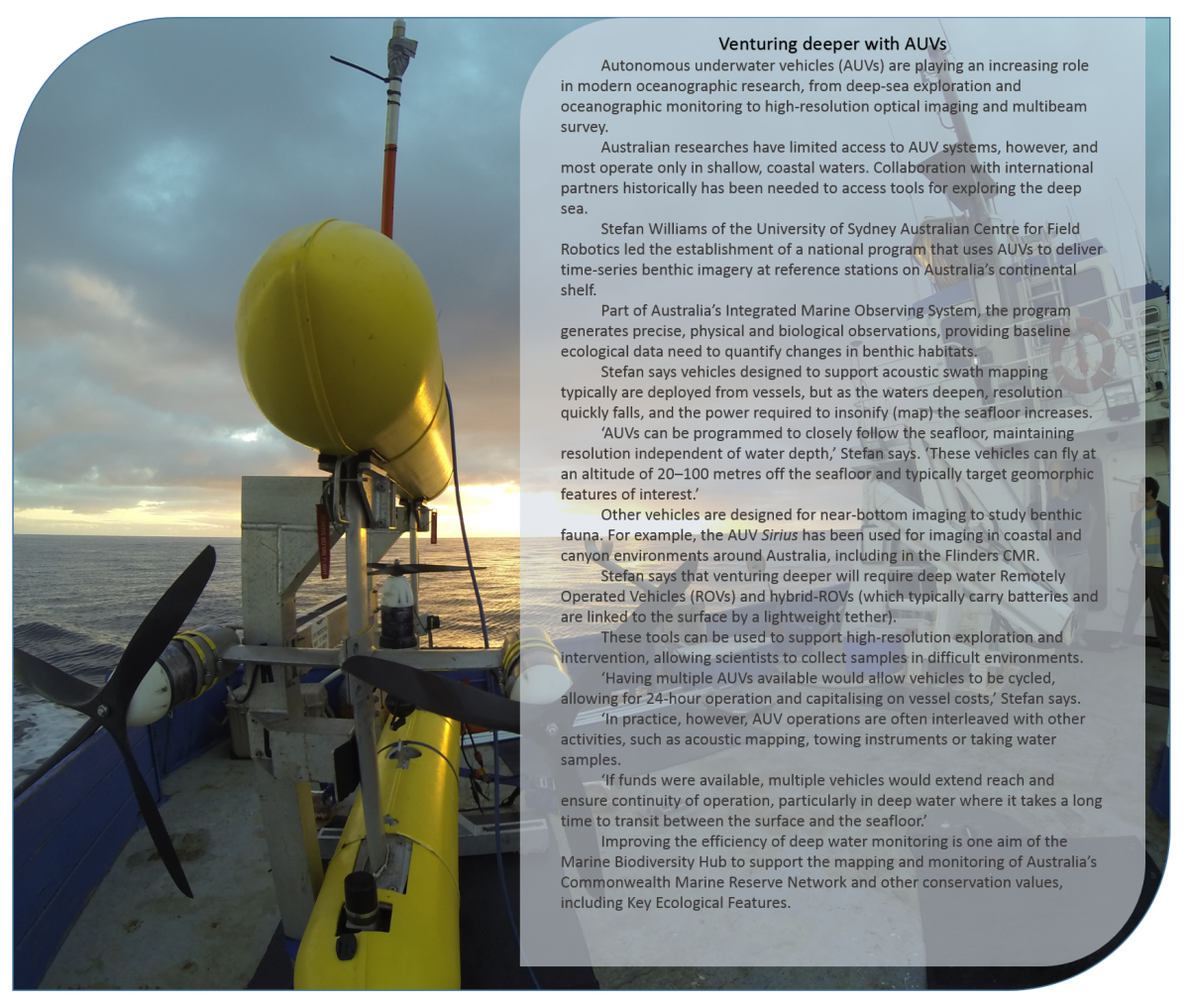
Swath mapping using ship-borne acoustics indicated the presence of reef systems, while towed video, baited underwater video and autonomous underwater vehicles (AUVs) added finer detail and visualised habitats, fish and invertebrates without the need for invasive sampling.
Photographic inventories of deep-water fish communities at 500 m depth were made for the first time in the Flinders reserve using ‘DeepBRUVS’ landers: baited, instrumented, camera systems that sit on the seabed.
Electronic controls on these systems initiate and synchronise the cameras, lights, and bait delivery, enabling images to be collected at pre-determined intervals for extended periods (weeks to months). Sensors on the landers measure environmental conditions, including water currents.
‘The project demonstrated that DeepBRUVS have good potential for monitoring seabed ecosystems, and can be cost-effective because they can be deployed and retrieved by passing fishing vessels”, Alan Williams of CSIRO says.
Reefs ain’t reefs
Diverse reef systems revealed during the project included steep, canyon-head structures with underwater cliffs; flat sedimentary rocks; and sandstone and mudstone stacks with ledges sheltering invertebrates, rock lobsters and fishes.
‘We noticed when surveying, that different seabed features such as sand-inundated or step features, had quite different assemblages living on the rocky outcrops,’ Nicole Hill of the University of Tasmania (UTAS) said.
‘So even if you can locate reefs, they will not all be the same, and you won’t necessarily know what is living on them without further sampling.’
Another confounding factor is water depth: in deeper waters the multibeam signal widens, losing resolution, and making smaller features difficult to determine.
‘Ideally we would have a full multibeam map with representative sampling by AUV-based imagery sufficient to reliably quantify the extent and types of habitat we find there, as well as the cover of key benthic species.’ Neville Barrett (UTAS) says. ‘Then fine-scale environmental relationships could be used to predict habitat types and species assemblages across a broader range.’
What can be predicted?
The potential of predictive modelling based on full coverage maps has previously been demonstrated in Marine Biodiversity Hub surveys off southern Tasmania’s Tasman Peninsula.
Here, predictive modelling was used to examine fine-scale relationships between reef-invertebrate distribution and reef characteristics derived from textural (swath data), topographic (bathymetry) and geographic datasets.
These relationships were then used to produce regional-scale biodiversity maps (with estimates of uncertainty), and to identify processes and patterns that shape temperate reef communities.
The modelling suggested that combinations of fine-scale processes such as light limitation and habitat complexity, and broad-scale processes such as regional currents and exposure regimes, are important in structuring these diverse deep-reef communities.
While habitats could be predicted from swath data – particularly large, hard structures such as the tall pinnacles of Hippolyte Rocks – validation with tools such as AUVs is necessary in areas such as the Flinders CMR, where many reefs are low profile and covered in sand.
New toolkit ready to go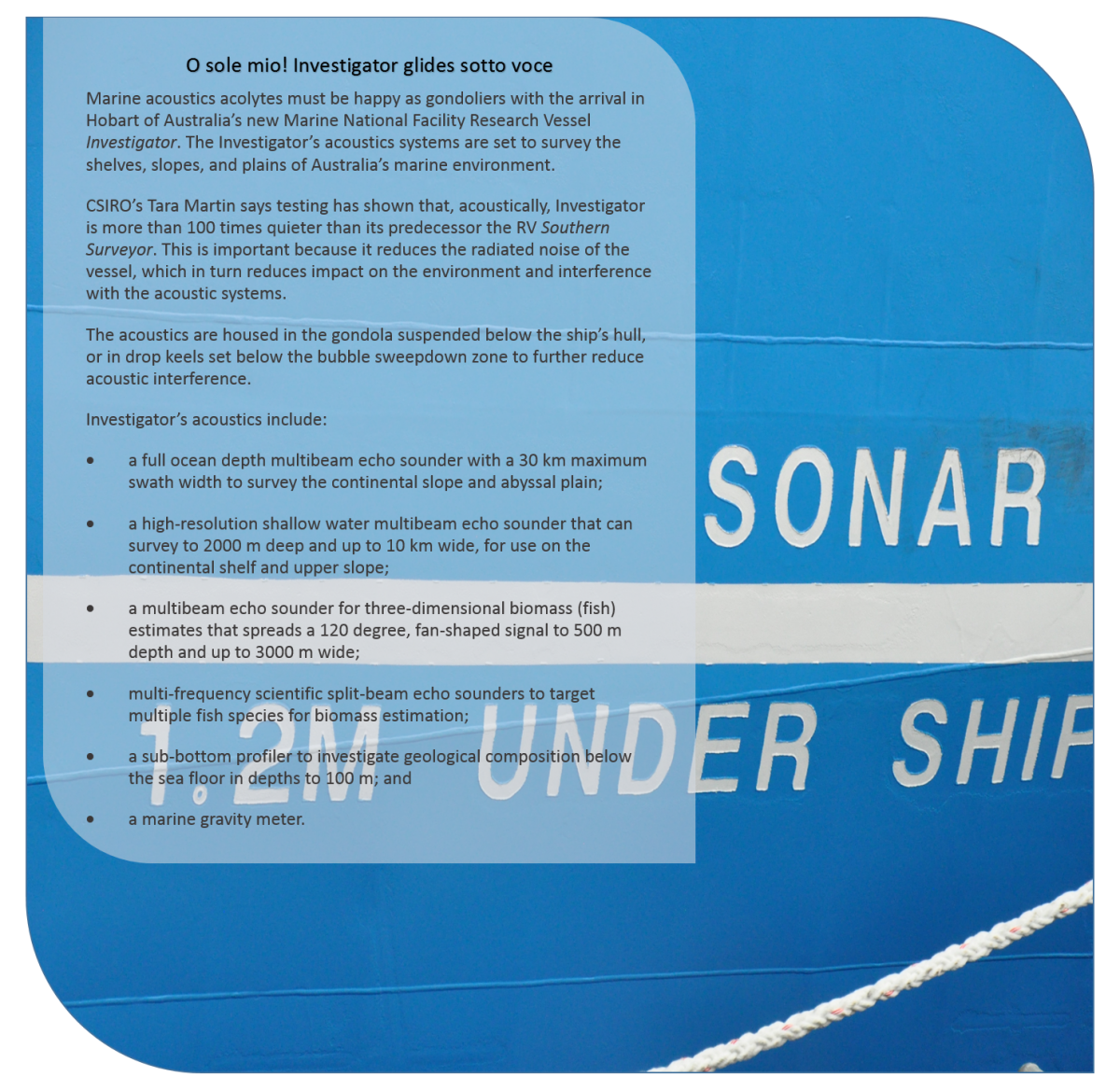
(click on image to open in new window)
‘Our approach represented a significant change to typical deep-water surveys’ Neville says.
‘While the slope of the Flinders CMR had been extensively mapped, habitats and biota on the shelf had not been well sampled.
‘The previous approach had been to map a particular feature and describe the fauna on it, but not in a way that could be quantified, and certainly not in a way that could be used to estimate, with some reliability, the extent to which such species or habitats are found throughout the CMR.’
‘By focussing on the statistical requirements for establishing a long-term monitoring baseline, we were able to maximise the information that we could obtain from a time-limited survey.’
‘We certainly have learned a lot from our work off Tasmania,’ Nicole says.
‘Prospectively we have a good combination of techniques for long-term monitoring that are cost-effective, non-extractive, flexible, with high power for extrapolation, and transportable to the deep ocean (a large portion of CMRs).
‘Now that we have an idea of what is there, we are looking at indicator species that might be suitable for informing management. ‘While there is still more to learn, we can begin to track changes while continuing to build up a picture of the values within the reserve.’
This cost-effective approach focussing on the specific needs of CMR managers is a new approach developed by the Marine Biodiversity Hub to support the Parks Australia in managing a vast CMR extending over more than 7 million km2 of Australia’s EEZ.
The Flinders CMR project involved University of Tasmania, Geoscience Australia, CSIRO, the University of Sydney (Australian Centre for Field Robotics) and the Integrated Marine Observing System.
Further information
- Video - Seabed habitats of Flinders Commonwealth Marine Reserve - Northeast Tasmania
- AUV provides imagery to assess southern marine reserve
- Nicole A. Hill, Vanessa Lucieer, Neville S. Barrett, Tara J. Anderson, Stefan B. Williams (2014) Filling the gaps: Predicting the distribution of temperate reef biota using high resolution biological and acoustic data. Estuarine, Coastal and Shelf Science 147 (2014) 137–147.
Images
Thumbnail above - A school of jackass morwong approaches the baited underwater video system set in the Flinders CMR.
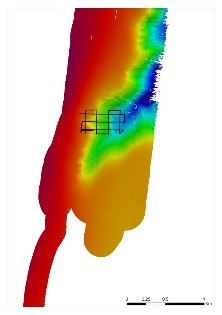
The Finders CMR survey discovered a network of canyon-head incisions into the shelf margin at the shelf-break. One of these is shown here, indicating the rapid change in depth over small distances in this area, with a 300 m change in depth over a 300 m linear distance. This habitat was characterised by steep underwater cliffs, and high water-column productivity, possibly supporting unusually high pelagic fish biomass. The Track of one AUV deployment is shown here. It extends from about 100 m depth to nearly 350 m depth, and collected the first high resolution imagery of such habitats in this region.
Contact
Nicole Hill, Institute for Marine and Antarctic Studies, University of Tasmania
Neville Barrett, Institute for Marine and Antarctic Studies, University of Tasmania
Stefan Williams, Australian Centre for Field Robotics (ACFR), University of Sydney
- Log in to post comments