June 5, 2017

 Day 22: Asher Flatt, onboard communicator
Day 22: Asher Flatt, onboard communicator
A flat abyssal plain was what we were expecting before the boat left the harbour in Hobart, an environment which our gear could glide easily across without complication. Things, however, are never so easy. Mapping has shown a complex deep-sea terrain with bumps and ridges galore. Alan Williams of CSIRO helped me put together this overview of how scientists and crew onboard the CSIRO RV Investigator adapt to the challenge.
Each deployment requires mapping of the terrain, so we know the lay of the land and have a basic idea of what we are sending our gear into. The multibeam sonar on board the ship fires pulses of sound to the sea floor and reads the return signals to churn out data for our on-board mapping experts, who then transform this dry data into beautiful dynamic images of what lies beneath the waves. With this we can tell depth, and even substrate type, to deploy our gear appropriately. A smooth operation requires at least a four-kilometre runway of flat(ish) terrain for our gear; this is where the real fun begins.

Communication is vital between the operations control room and the bridge where the captain steers the ship. Once we pick a survey line on the maps, we need to send this up top to the bridge so they can tell us whether or not the plotted course is feasible with the prevailing winds and currents.
The best method for maintaining a fine degree of control over speed and manoeuvrability is steering into the wind. Towed downwind, the ship is pushed too fast and is not able to retain the necessary control to react to unforseen events.
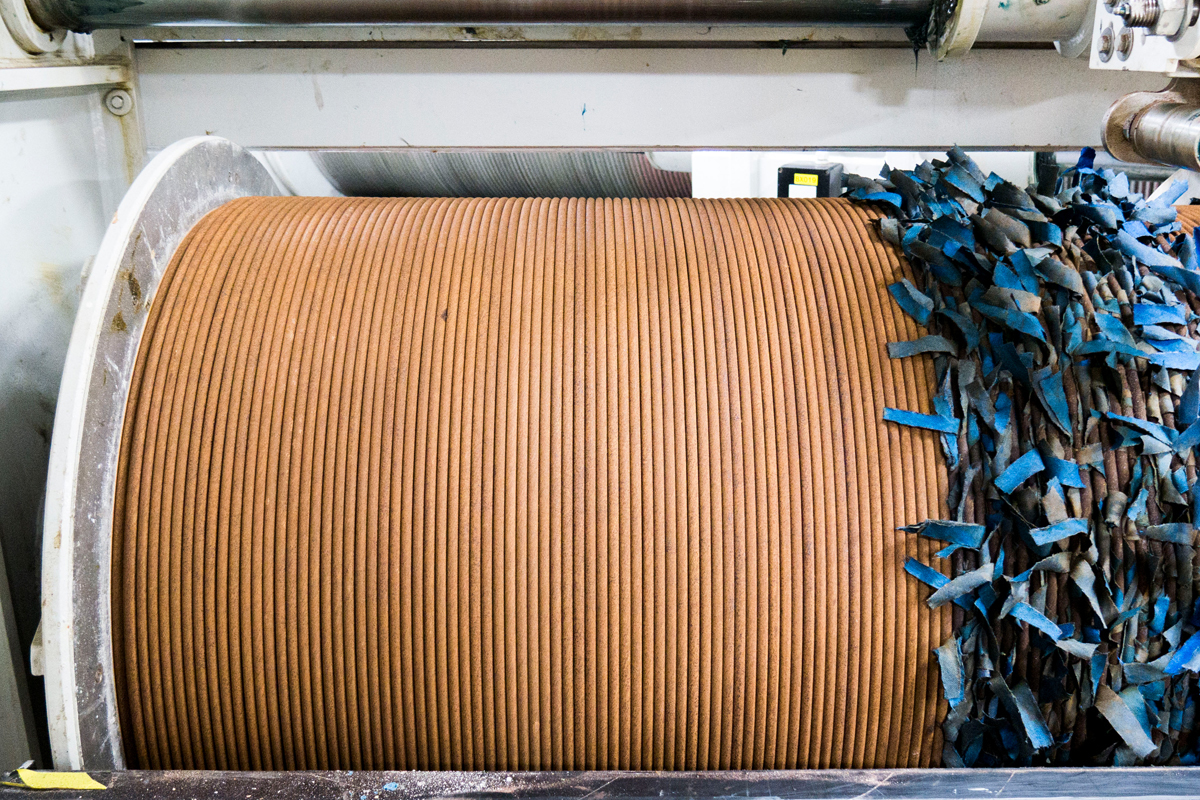
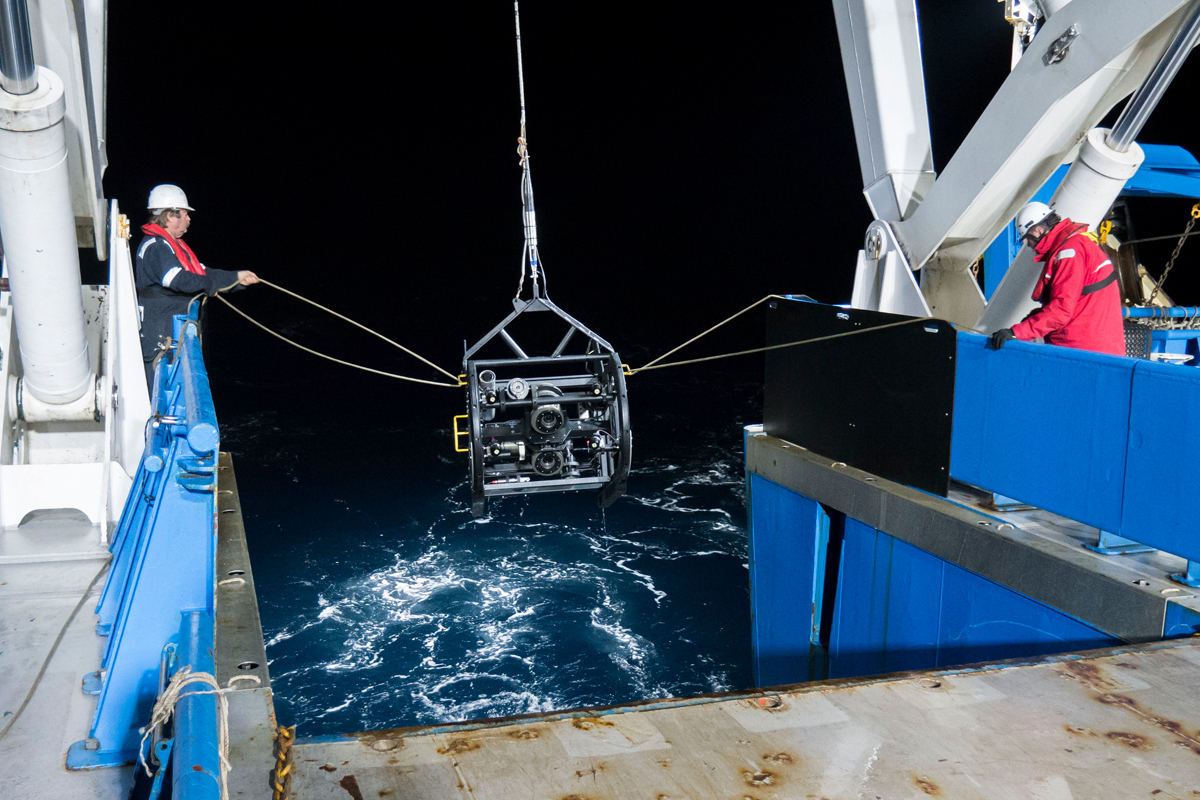
There is an operation under way as I write, which is going down to more than 4 km and will need more than 6 km of wire rope, weighing more than six tonnes. That's more than a fully grown African elephant in weight, stretched out over a length almost twice the height of Mount Kosciuszko. It takes about two hours for this mammoth wire rope to unwind to the right length and deposit our gear on the ocean floor. Once it touches down there is an hour long drag time through the abyss before our gear is once again reeled in like a big game fish, our precious catch and cargo within.
Once it is below 1000 m, our gear will be completely in the dark, alone in an alien world. However, we maintain constant communication with it through a sonar beacon that will transmit a signal back to the ship. Nestled away in our warm, dry operations room we can see the gear on our maps, a red blip following another red blip overlayed onto the folds and flats of the ocean floor. A small boat, sampling the life of the unknown abyss, on a vast ocean of blue.



- Log in to post comments